
中国深センよりオーダーしていたPCB基板が届きました。早速、ドライバなどはんだ付け開始。
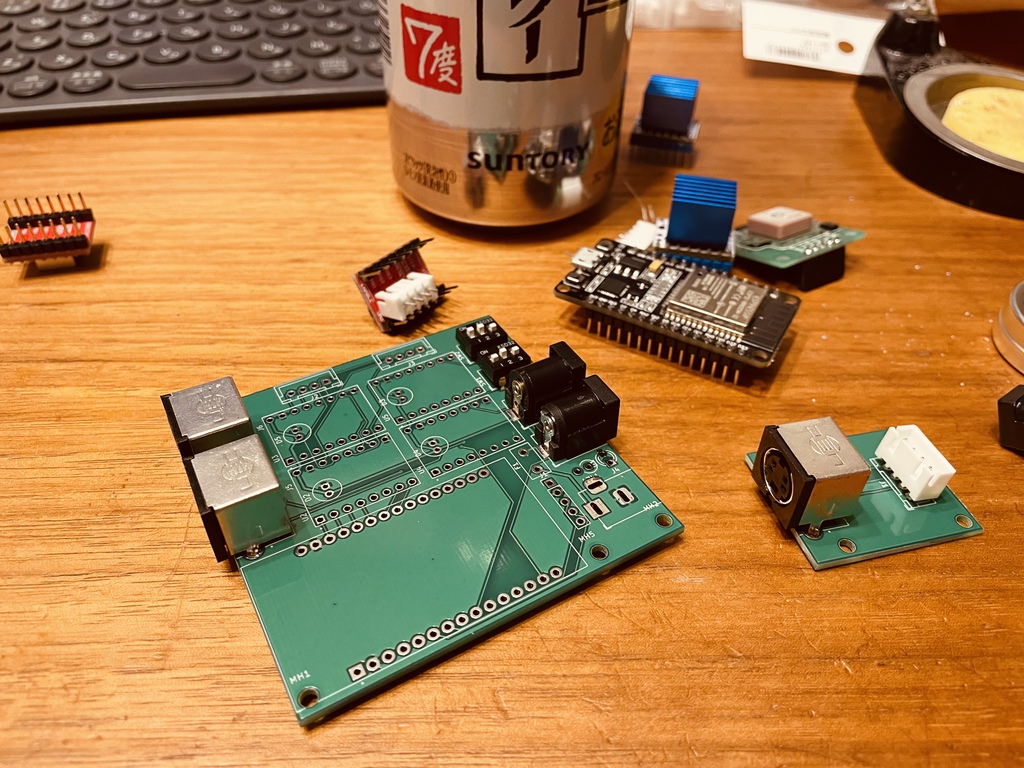
送料抜きにすると1枚63円。ただある程度枚数を注文しなきゃいけないので、今回は左の大と右の小を10枚ずつ。それぞれ628円。プラス送料で約3200円。送料の方が高い・・・・orz まとめて注文すれば送料が変わらないのでお得になる。でもそんなに頻繁に必要ではないからな〜
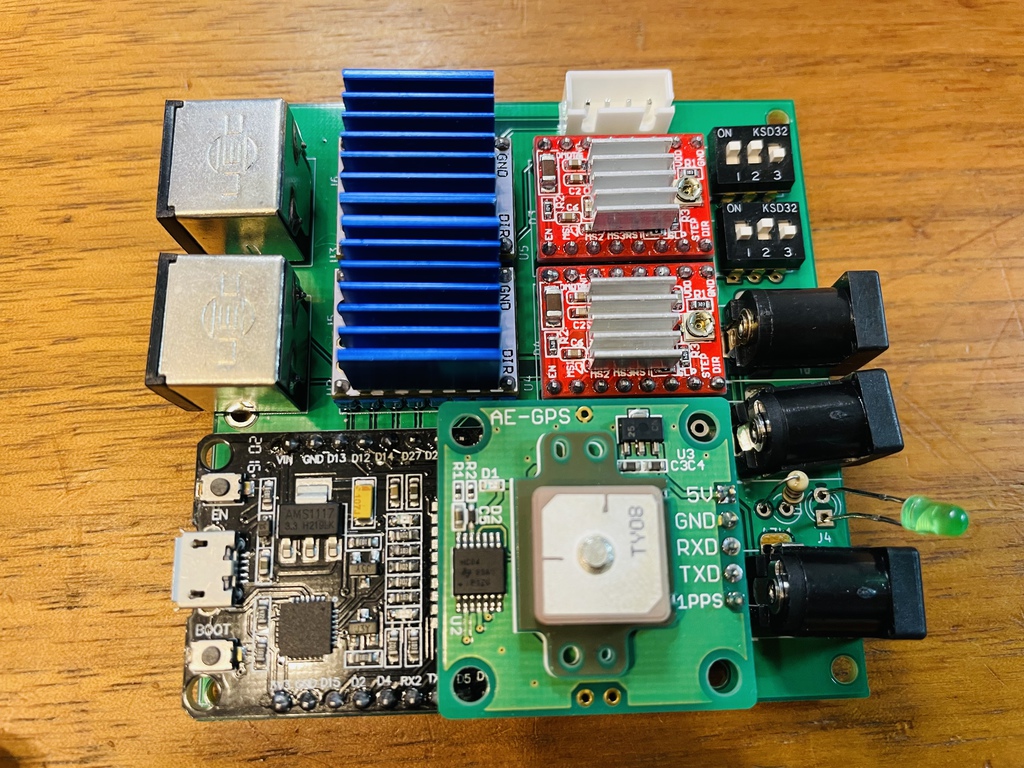
TMC2208(青いヒートシンク)ドライバが家に2個しかなかったので、とりあえずA4988ドライバを仮にはめてみた。
最初、かなり飛ばして製作したけど紆余曲折と部品調達に時間がかかり、結局時間がかかってしまった。でも、納得できる仕上がりとなったので満足。まだ早いか!?実戦投入して赤道儀としての性能を確認しないと。KStars&EkosとOnStepの相性はとても良いと思う。OnStepの設定は理解するまで時間はかかったけど、理解すると細かな設定が出来るので安心して使える。



今夜、天気が良さそうなので試せそう!
完成おめでとうございます。
すごくコンパクトでカッコいいですね。
ずっと、ワクワクしながら拝見させていただいていました。
KENさんのブログを見てサイクロドライブについても興味を持ち、
いろいろ調べたりしています。3Dプリンタは楽しいですね^^
実験の結果報告、楽しみにしています^^
ありがとうございます。
サイト拝見しました。サイクロイドドライブ研究されていますね。
RA軸の減速比は、ドライブで1:45。モーターとドライブつなげるベルト・プーリーで1:4。トータルで1:180となりました。
これから、作り方のページを作成して、データはThingiversにアップする予定です。
サイクロイダルドライブは、Youtubeやネット情報の良いとこ取りして、試行錯誤繰り返した(フィラメント相当無駄にしました)ので、性能はかなり良いと思います。ネット上ではロボットのアクチュエータに利用する場合は多く、パワー重視が多いですが、今回は精度重視なのでちょっと大変でした。
今夜このまま雲が出なければよいのですが・・・・
×研究した
〇サイクロドライブ、全然理解できなかったので、いろんなページを覗いてどうにか理解しようともがいた・・
が正解です^^;
dual cycloidal drive はそんな中で、
https://woodencaliper.hatenablog.com/entry/2020/02/24/135814
というページを見て、これ、また普通のcycloidal driveとは違う不思議な構造だな? ということで興味を持ちました。
その後、
https://www.youtube.com/watch?v=ewoUsVMFWfU
等を見つけたのですが、結局、減速比の計算式を見つけられず、学生の頃に戻ったつもりで方程式を立てたりして結果に辿り着きました。非常に大きな減速比が得られるわりに、仕組みが単純なので遊んでみたくなった・・・という感じです^^;
教えて頂き、PETGに戻したことで3Dプリンタの動作も快適で、実験もとても楽しいです。
完成した、赤道儀の撮影テスト、本当に楽しみです^^
軽くて小さくて、二軸ガイドができる・・・ まさに理想の赤道儀ですね。
Dual Cyclodal DriveのYoutube見たましたが、私も理解出来ませんでした(笑
ブログで図面を拝見しましたが、内歯から動力を取り出す軸が3本ですね。それがガタの原因かもしれません。内歯に開けた穴を小さくしながら何度もトライアンドエラーを繰り返しましたが、最終的に4本だった軸を6本に増やすことでガタをゼロにすることにできました。
最近、晴れの日に飲み会が入っていたり、出張だったりなかなかタイミングが合いません。
先日、天気予報で1時間ほど晴れ間ができることが分かり、速攻出かけて赤道儀をセット。極軸を合わせて、さぁPlate Solvingというところで、雲がかかり終了でした。
> ブログで図面を拝見しましたが、内歯から動力を取り出す軸が3本ですね。
Dual Cyclodal Drive では 内歯から動力を取り出す軸は必要ないんです。
3本の軸は単に間の2つ内歯がくっついたものと干渉せずに、両側の内歯を固定するだけのもので、「内歯に開けた穴」は3つの軸がぶつからなければ良いので、細かな調整はいらないということになります。
ではどこから動力を取り出しているかというと、Bの外歯が回転するのでその回転を取り出しています。Bの外歯の回転が、そのまま一番左側の青い部分の回転になります。
内歯は、左からAの内歯1, Aの内歯2(1と位相が180度ずらしたもの、KENさんの2つの内歯で振動を抑えてるのと同じ仕組み)、Bの内歯1(Aの内歯2に固定されている)、Bの内歯2(Aの内歯1に3本の軸で固定されている)という風に並んでいます。
Aの外歯は固定されているのでAの内歯1,2がゆっくりと回り, つまりそれぞれに固定されているBの内歯1,2もゆっくりと回ります。さらにBだけに注目するとBの内歯は、Aの内歯に固定されているわけなので、固定されていないBの外歯が回ることになり、それが動力として取り出されるわけです。
なんだか複雑ですが、Dual Cyclodal Driveでは軸を使って動力を取り出す部分が不要であることは一つのメリットとなっていると解釈しています。
やっと理解しました!
減速比が半端ないですね。作って見ようと思います。ていうか作らないと真の理解につながらない・・・
3軸は出力ではなく前後の歯を固定するためだけなんですね。ガタはどの程度ありましたか?
A,B 2のドライブを逆向きに貼り合わせているから、直観的には全体としてその差分だけ回るという感じですね。
厳密にいうとAにとっての軸一回転は、BではAの回転分だけズレるので、方程式を立てて解かないとならなかった感じです^^;
Dual Cyclodal Driveは、2つの内歯で実現可能なのですが普通のサイクロドライブが2つの内歯にすることで振動を抑えるのと同じようにそれぞれ2つ(計4つ)にすることで振動を抑えている・・と理解しています(計2つでも180度ずらしておけば振動は抑えられるのかもしれません)。
さて、ガタですが、やっと1.0倍の内歯が出来たのでバリをとって実験したところビクともしなくなりました。
他には何もしていないのですが、回転させる際の抵抗も減って何だか妙にいい感じです。
いよいよ赤道儀としてくみ上げて見たくなってきました^^;;
というか、3Dプリンタ、思ったように物ができるようになってくるとどんどんハマりますね^^
KENさんからいろいろ教しえて頂いたこと、利用させて貰っています^^
百聞は一見にしかず、作ってみることにしました!
完成おめでとうございます。
ポータブルで自動導入まで可能なしっかりした赤道儀って市販でも非常に少ないですね(無いかも)
運用うまくいくといいですね。(私も作りたいですが、3Dプリンタの予算が。。。。(泣))
ありがとうございます!
これが機能すれば、1万5千円程度で作れるので裾野が広がるかな〜〜と。
昨夜、試験しましたが赤道儀は上手く動いたと思いますが、StellarmateとRPI-Cameraドライバがトラブってしまい正しく導入されているか画像で確認することが出来ませんでした。昨夜の気温が4度だったので、寒くて粘れませんでした。今夜は、ガイドカメラを元に戻して試して見る予定です。
執筆中のまとめ記事素晴らしいですね。
天体趣味の方は3Dプリンタお持ちの方が多いのでブームになるかも