
チャシャ猫(天体写真メモ)さんが取り組まれているDual Stage Cycloidal Driveですが、仕組みがさっぱり分からず考えないようにしていました(笑
チャシャ猫さんの進捗を見て改めて仕組みについて研究してみました。Dual Stage Cycloidal Driveは2つのサイクロイダルドライブを背中合わせに繋げた様な仕組みです。1つ目のドライブで減速し、その減速された動力を二つ目のドライブで更に減速する仕組みです。ただ減速比について何度考えても理解できず・・・
百聞は一見にしかずなので、作ってみることにしました。今まで作ってきたシングルサイクロイダルドライブのパーツを可能な限り流用できるものとしました。とりあえずCADデータは完成しました。シングルドライブよりパーツ点数を減らせるので軽量化、製作コストの削減が可能です。また減速比が大きいのでNema14ステッパーモーターなど小型薄型の非力なモーターでも動きそうです。モーターは結構重たいので軽量化とコンパクト化の期待もできます。
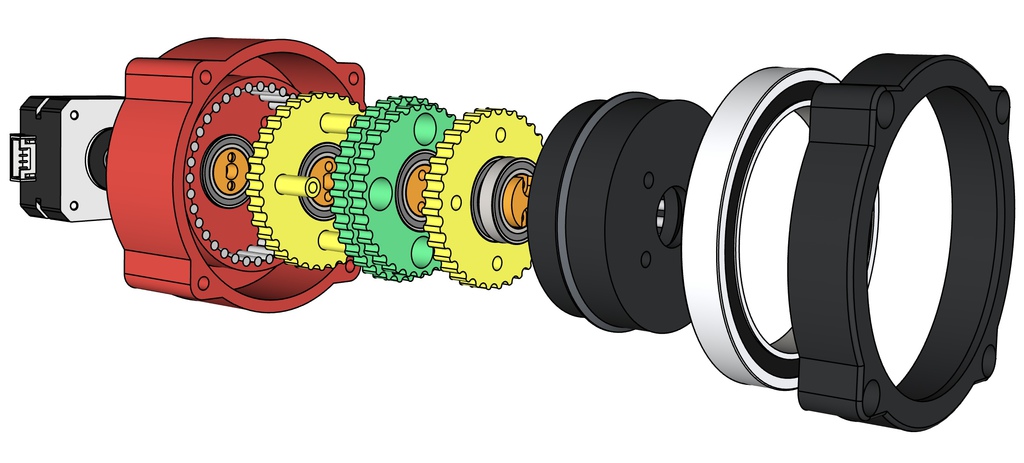
一番問題だったのは減速比の計算です。1つ目のドライブ(赤いケース部分)の減速比は、1:35です。緑の円形ギアは両方で共有されるギアでつながっています。2つの黄色の円形ギアは緑の円形ギアを挟んで固定で繋がりますので、同じスピードで回転します。
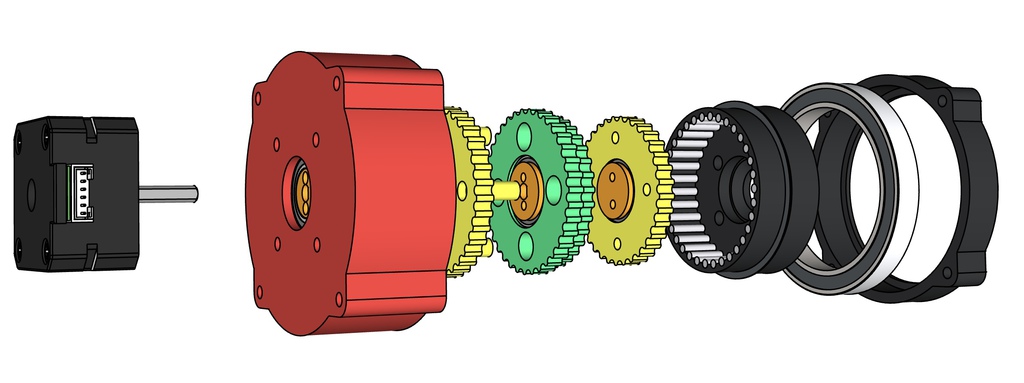
2つ目のドライブ(黒いケース部分)の減速比は普通なら1:33となりますが、向きが逆です。昨夜実験してみましたが、内側の円形ギアが外歯の数だけ回転すると外歯のケースがちょうど一回転しますので、逆向きの場合は1:34となるようです。
なんとなく35×34で1:1190となりそうですが、どうも違うようです。チャシャ猫さんの記述では
となります。例えば、1:15 と 1:11 を組み合わせた場合、
m = (15-11)/15(11+1)
= 4/15*12
= 1/15*3 =1/45
となり、減速比は1:45。これに当てはめて計算すると
1:35 と 1:33(正方向比)を組み合わせた場合、
m = (35 – 33) / 35(33 +1)
= 2 / 1,190
= 1 / 595
となり、減速比は1:595。
他のサイトの計算式でも同じになったので、これで合っているでしょう。
回転ムラとガタについて
シングルドライブの場合のガタの殆どは動力を取り出す出力軸と円形ギアの穴の遊びが原因でした。このデュアルドライブは出力軸がないので、基本ガタはないと思います。チャシャ猫さんが書いてたことがやっと分かりました(笑
回転ムラに関しては、円形ギアの深さに起因していました。どれくらいがベストなのかは試していないので分かりませんが、浅すぎると回転ムラが発生することが分かりました。これは円形ギアの回転軸のオフセット(ズレ)の量で調整できます。今回3mmのピンを使うので、オフセットは0.8mmとしました。一回転で1.6mm幅で中心からずれて回転します。ピンの約半分なので良い感じだと思います。
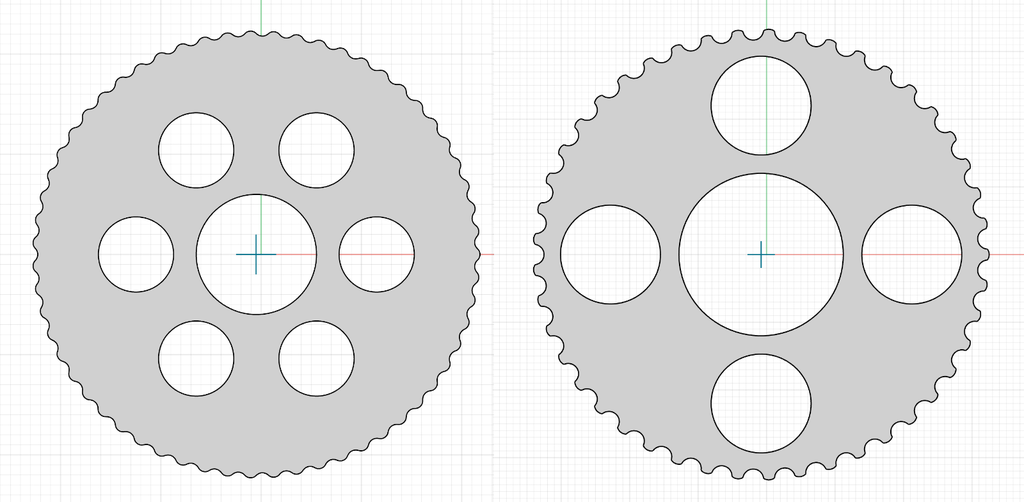
左が0.5mm、右が0.8mmのオフセット。右側の方がギアが深くなっています。深いほうが回転ムラは少ないです。(ちょっと円形ギアの大きさが違いましたが伝わりますね。)ギアを深くするためには外歯の数を増やして間隔を狭める必要があります。
さて、今夜からプリント始めます。性能によっては、すぐにデュアル・サイクロイドドライブ赤道儀の製作が始まるかも・・・。まだシングルも検証まで行ってないのに・・・orz
I have been researching cycloidal drives too. I’m impressed with your results. However when I have been struggling with generating the tooth profiles. Do you have any recommended resources you used to generate the conjugate profiles? Did you use the envelope method? If so, how did you do it?
Some hints or even pointers in the right direction would be super helpful.