
まずは、サイクロイダルドライブを採用することにしたので、その試作をしてみることにしました。Fusion 360でギアのデータは出来たので、それをもとに3Dプリント。内側のプラネタリーギアは問題(縮小)なく出力出来ました。24mmのベアリングもピッタリ!結局ギア比を気持ちの良い数にするために、外歯46(偶数)で内歯を45としました。これで減速比は、1:45
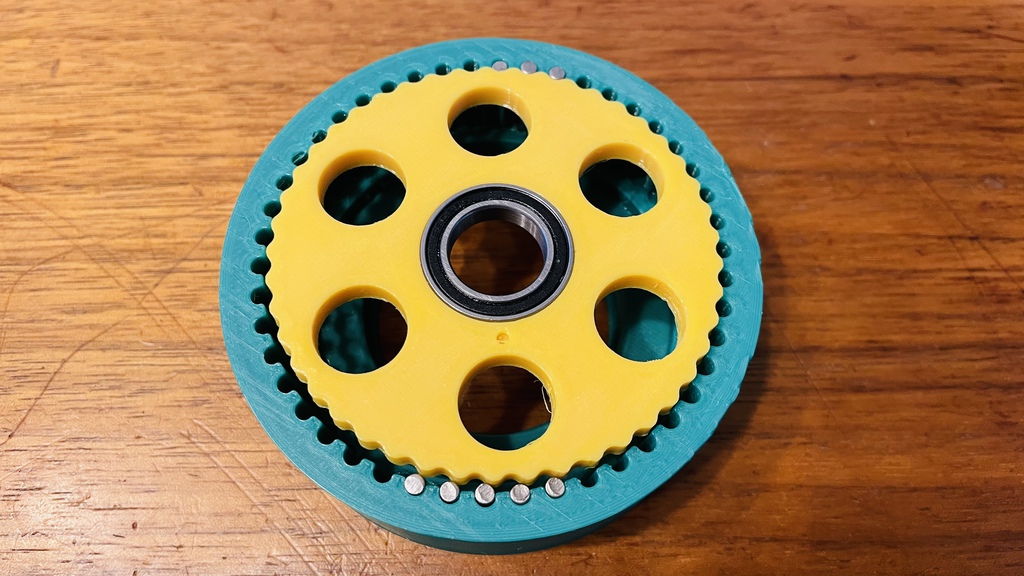
しかし外側の枠が微妙に(半径0.5mmくらい)縮んだようで、全くプラネタリーギアが回らない。回らないと言うよりピッタリハマってる感じ。これからトライアンドエラーを繰り返して丁度よいサイズを探らなければなりません。余ったフィラメントを使ったので、気持ちの悪い色の組み合わせ(汗)ZWOの赤黒に対抗して緑黄にしてみるか(笑)
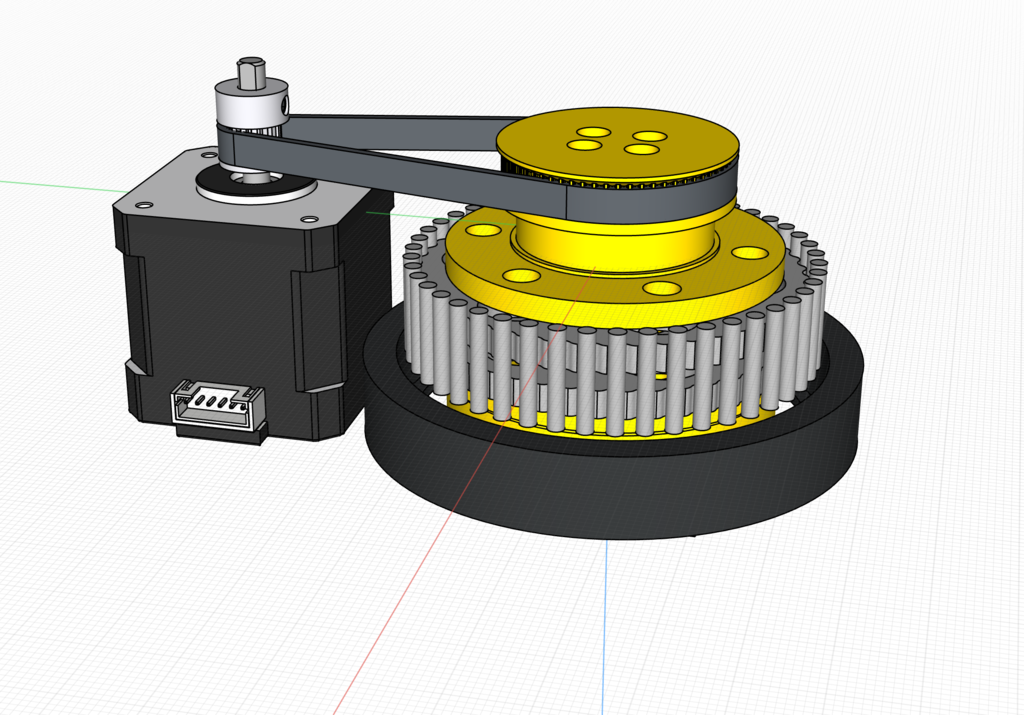
ステッパーモーターにつけるプーリーは市販の16歯です。ドライブ側のプーリーの歯数を64にすれば、1:4の減速比になります。GT2規格のプーリーのFusion360での作り方は時間のある時に投稿しようと思います。情報も少なく英語だったので日本語で、自分の備忘録として・・・。
1:4で減速し、ドライブで更に1:45の減速となるので、トータルで1/180となります。気持ちの良い減速比になりました。
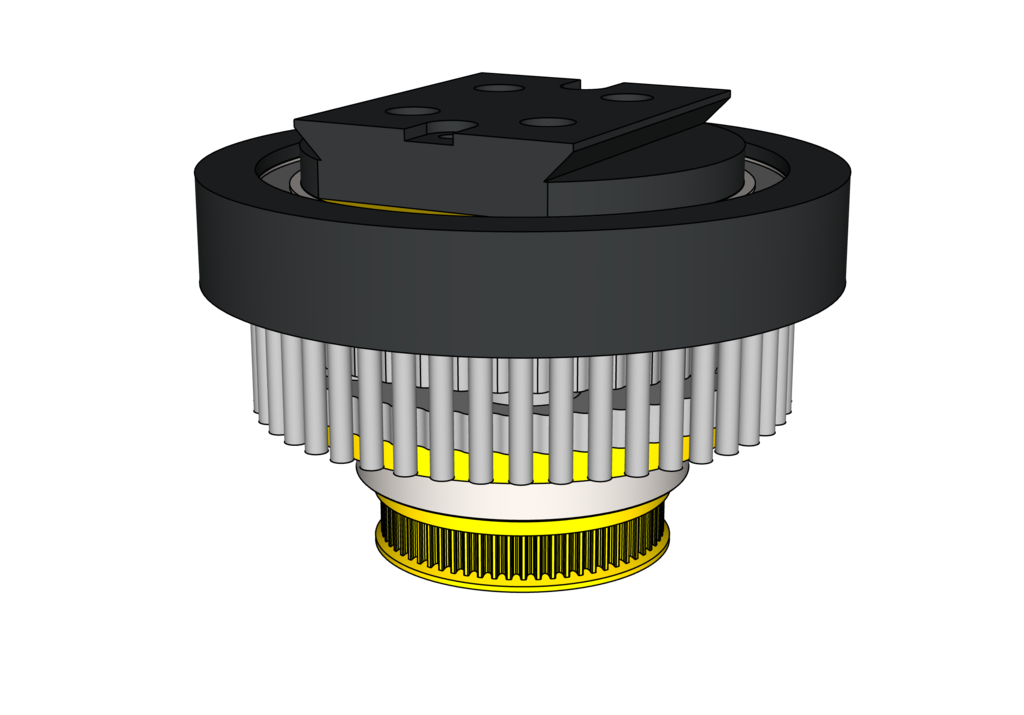
極軸(RA)軸は、こんな感じ。AZ-GTiと似たような感じになります。Arca Swissのマウントもプリント。
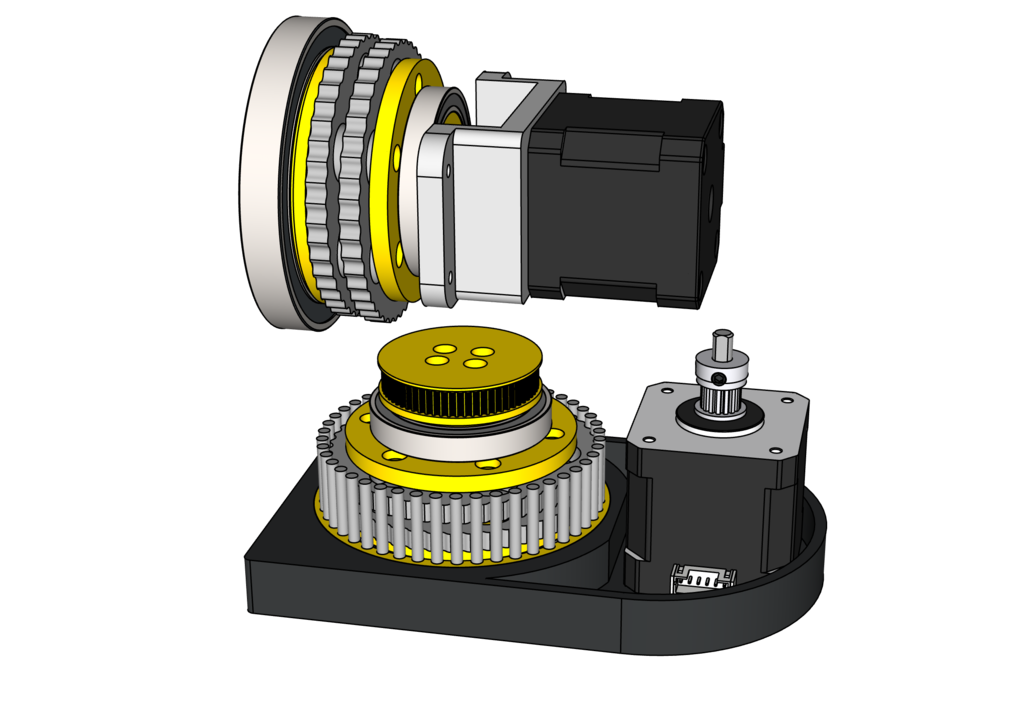
内部の配置はこんな感じになると思います。DEC軸はステッパーモーターから直接インプットします。よってDEC軸は1:45となります。一つ心配ごとが、通電していない時に保持力が効くかどうか。ZWOのハーモニック赤道儀はブレーキ機能が付いているらしい。こればっかりは出来てからの確認になりそう。モータードライバの節電機能をオフにすれば常時通電になるので問題ないと思うのですが、今度はバッテリーの保ちの心配が出てくる・・・
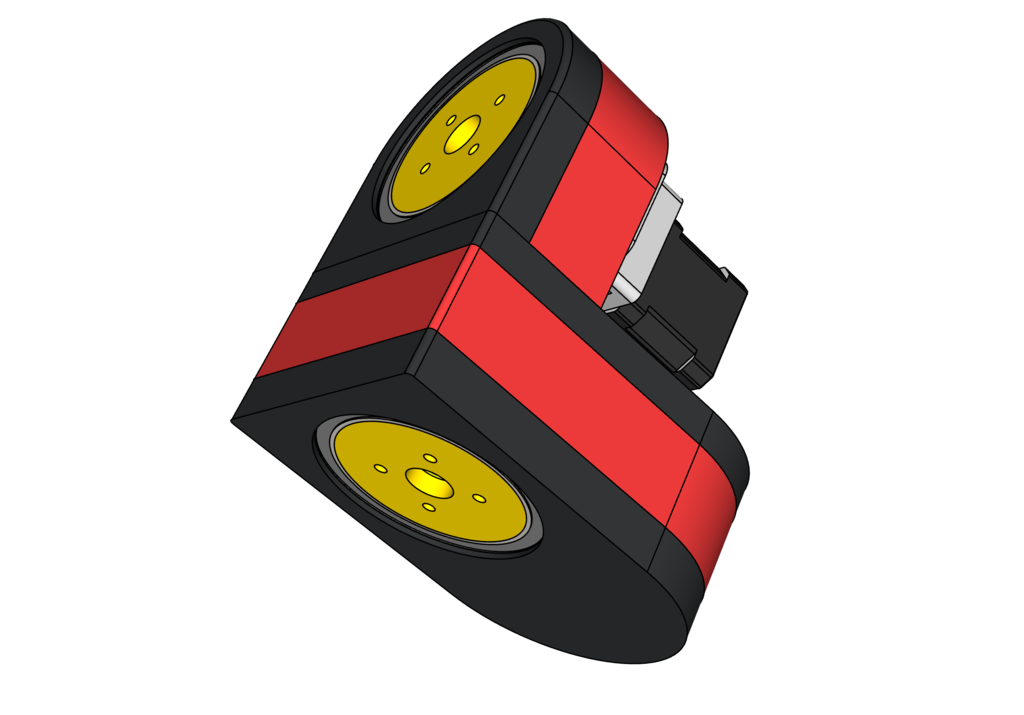
最終的にはこんなのイメージしています。Arduino(onStep)とモータードライバをどこに収納するか、モーターが露出しているのでカバーをどうするか。まあ、この考える段階が楽しいんだよね。
超小型、ハイパワー赤道儀になるはず、
KENさん
これは、、、
完成したら楽しそうですね。
電源だとかシリアル制御信号とかのケーブルも整理できるといいですね。
撮影環境の再構築でチェックしましたが、INDIはシリアルTCP/IP変換されたデータ全く問題なく動きますので(無線も)無線化してしまうか、必要なケーブルをすべて内蔵してしまうのも良いかもしれません。(設置がすごく楽になりますね)
T-Studioさん、こんにちは!
まだ、ソフトまで手が回っていない状況です。onStepの知識もまだゼロです。ネットで調べるとTenssyで作られている方が多いですが、Arduino 全般で動作しますよね。たぶんその段階になるとまた色々質問させてもらうことになると思います。よろしくお願いします。