
ローテーター、フォーカーサーをDIYして上手く動作するようになってきたら、赤道儀もDIYしたくなってきたので、どのようなものを作るのか考えてみる。一般的な赤道儀は、ドイツ式赤道儀。鏡筒とバランスを取るためにカウンターウエイトが必要なので、全体的に重くなる。

ちょっと前にZWOからカウンターウエイトがいらないハーモニックドライブを内蔵した赤道儀が発売された。内側に柔らかい波動ギア入っているのが特徴で、十分なパワーがあるのでカウンターウエイトが不要なのだと思う。

ハーモニックドライブは説明が難しいのでYoutubeで動作説明動画があったので見るとよく分かると思う。バックラッシュなしで動作します。
3Dプリンターでハーモニックドライブをロボットのアクチュエーターとして作っている人がいますが、耐久性に問題があると思う。そこで同じくロボットに使われているCycloidal Drive(サイクロイダル ドライブ)を使った赤道儀を考えてみようと思います。サイクロイダル ドライブも説明が難しいので動画載せます。こちらも精度を上げればバックラッシュは限りなく減らせます。
ギアの設計が一番面倒ですが、調べたところFusion 360のプラグインにCycloidal Drive Makerなるものを発見。これでほぼ問題解決。360ではなくShapr3Dを使っていますが、ギアだけFusion 360で作ってエクスポートするれば慣れた環境で作れる。あとはネットなどを参考にしながら全体のデザインを考えて行こうと思います。
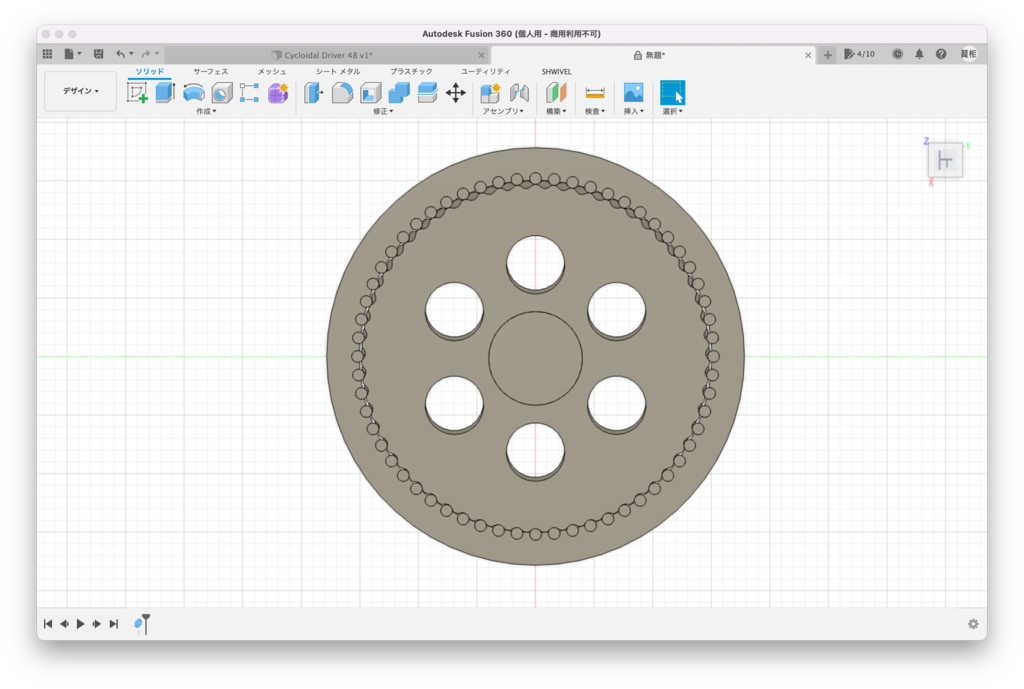
減速比は内歯数と同じになります。本当は1:60にしたかったのに外側のピンの数をプラグイン的に奇数にできなかったので、内側のギア数はピン数のマイナス1。よって59となってしまいました。しっくり来るのは外46ピン、内45歯くらいだろうか。さらにこのドライブとStepper Motorを1:5でベルト接続するので最終的に1:295の減速となります。
まずはサイクロイダルドライブを試作してみます。
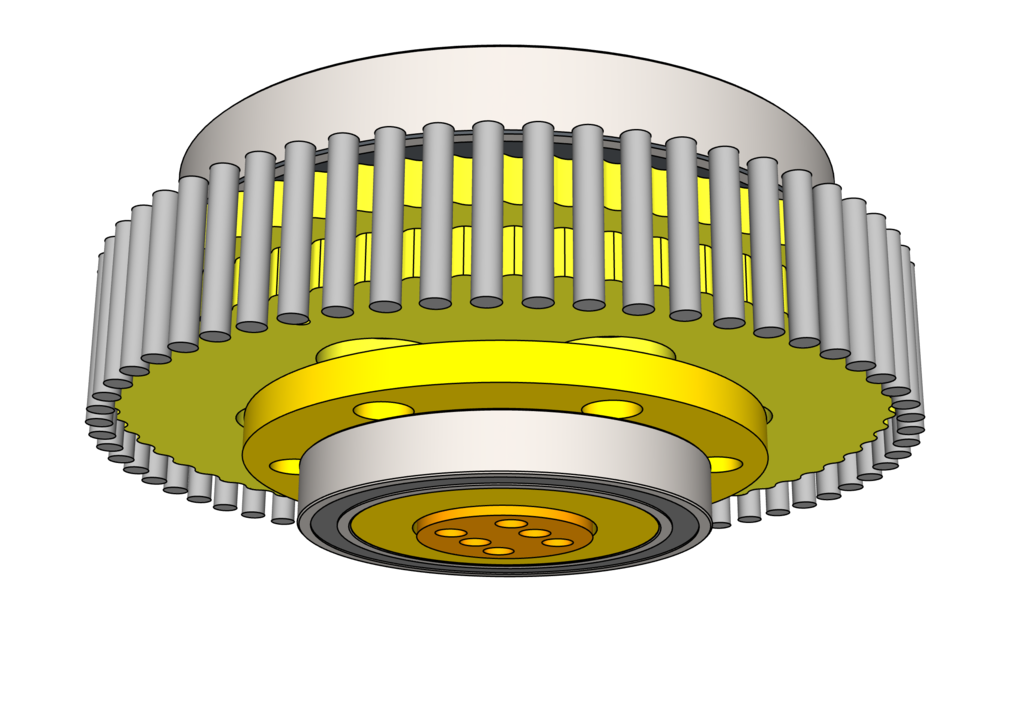
これですか! すごいことになってきましたね。サイクロイダルドライブは、プリントで作られるのですか? モデリングができてらっしゃるので、形になる日は近そうですね。目が離せません!
一応何度か試作してサイクロイダルドライブの目処がたちました。
0.1mm毎に大きさを変えてプリントを繰り返したので結構参りました。
近々動作確認できると思います。